CryptoDB
On Distributional Collision Resistant Hashing
| Authors: | |
|---|---|
| Download: |
|
| Presentation: | Slides |
| Conference: | CRYPTO 2018 |
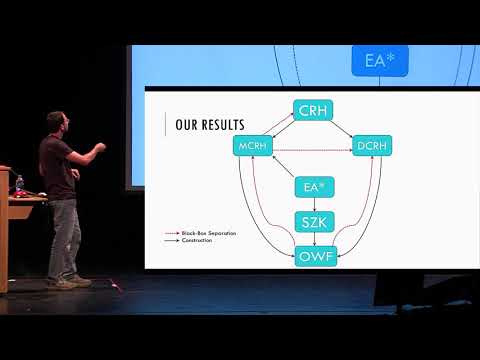
| Abstract: | Collision resistant hashing is a fundamental concept that is the basis for many of the important cryptographic primitives and protocols. Collision resistant hashing is a family of compressing functions such that no efficient adversary can find any collision given a random function in the family.In this work we study a relaxation of collision resistance called distributional collision resistance, introduced by Dubrov and Ishai (STOC ’06). This relaxation of collision resistance only guarantees that no efficient adversary, given a random function in the family, can sample a pair (x, y) where x is uniformly random and y is uniformly random conditioned on colliding with x.Our first result shows that distributional collision resistance can be based on the existence of multi-collision resistance hash (with no additional assumptions). Multi-collision resistance is another relaxation of collision resistance which guarantees that an efficient adversary cannot find any tuple of $$k>2$$ inputs that collide relative to a random function in the family. The construction is non-explicit, non-black-box, and yields an infinitely-often secure family. This partially resolves a question of Berman et al. (EUROCRYPT ’18). We further observe that in a black-box model such an implication (from multi-collision resistance to distributional collision resistance) does not exist.Our second result is a construction of a distributional collision resistant hash from the average-case hardness of SZK. Previously, this assumption was not known to imply any form of collision resistance (other than the ones implied by one-way functions). |
Video from CRYPTO 2018
BibTeX
@inproceedings{crypto-2018-28816,
title={On Distributional Collision Resistant Hashing},
booktitle={Advances in Cryptology – CRYPTO 2018},
series={Lecture Notes in Computer Science},
publisher={Springer},
volume={10992},
pages={303-327},
doi={10.1007/978-3-319-96881-0_11},
author={Ilan Komargodski and Eylon Yogev},
year=2018
}